Очень интересный вариант автоматики в первую очередь своей простотой и доступностью. Есть пара вопросов. Как датчик атмосферного давления участвует в алгоритме или просто информация об атмосферном давлении? Можно ли реализовать очень полезный момент в регулировке отбора-автоматическое уменьшение ШИМ клапана после срабатывания стопа на заранее заданную величину и совсем уж хорошо-увеличение ШИМ при длительном отсутствии стопа?
В новой прошивке при изменении атмосферного давления будут корректироваться значения «старт» и «стоп», автоматическое уменьшение ШИМ тоже будет.
Зачем увеличивать ШИМ?
Шим есть необходимость увеличивать для вывода колонны на максимальную производительность, когда не всегда возможно правильно установить начальный шим, хотя можно обойтись только понижением, просто в начале чуть завысить, тем более в начале погона и отбор пошустрее. Ещё один момент, можно ли добавить второй клапан и автоматически переключаться с отбора голов на тело(либо по температуре куба, либо ещё по какому нибудь параметру, датчику уровня например), хвосты можно отбирать через клапан голов , а можно и вообще не отбирать.
С шимом надо подумать. Если датчик установлен в дэфе то увеличение скорости — это гарантированный пропуск хвостов в отбор.
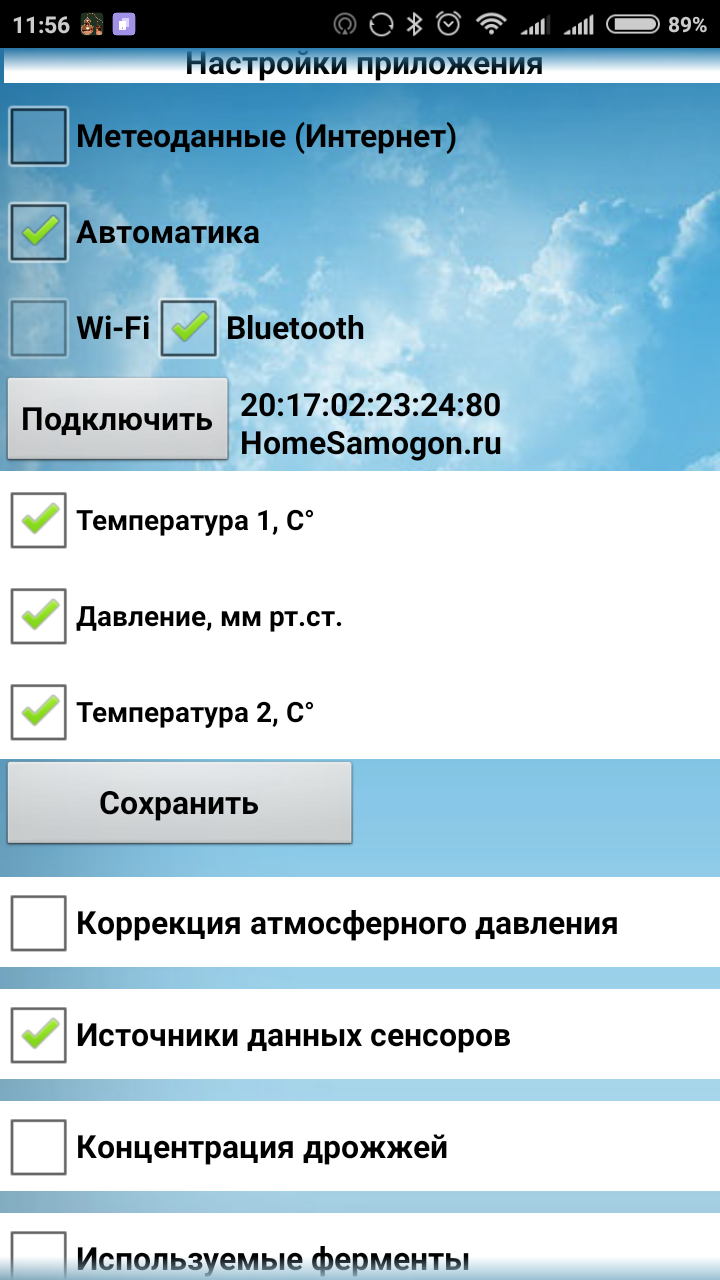
Я сейчас я заканчиваю новую прошивку, в ней есть возможность расширения. Т.е. можно реализовать и доп. датчики и исполнительные устройства, все что угодно. По ходу дела буду добавлять эти функции в приложение Подробнее тут: https://homesamogon.ru/bp/
Если датчик в дефе, то пожалуй такой алгоритм вообще не прокатит, всё таки он для датчика в теле насадки (20-30 см от куба). Вообще реализация зачётная и с управлением на андроиде, надо будет на досуге собрать, посмотрел под кроватью все детали есть, кроме БТ модуля, но его можно задорого в соседней лавке купить если с алика будет невтерпёж.
Неа 🙂
Стабилитрон нужен для согласования уровня на RX ESP8266 (кстати, схема прекрасно работает и без него)
Питание 3.3В обеспечивает преобразователь LM1117

Очень интересный вариант автоматики в первую очередь своей простотой и доступностью. Есть пара вопросов. Как датчик атмосферного давления участвует в алгоритме или просто информация об атмосферном давлении? Можно ли реализовать очень полезный момент в регулировке отбора-автоматическое уменьшение ШИМ клапана после срабатывания стопа на заранее заданную величину и совсем уж хорошо-увеличение ШИМ при длительном отсутствии стопа?
В новой прошивке при изменении атмосферного давления будут корректироваться значения «старт» и «стоп», автоматическое уменьшение ШИМ тоже будет.
Зачем увеличивать ШИМ?
Шим есть необходимость увеличивать для вывода колонны на максимальную производительность, когда не всегда возможно правильно установить начальный шим, хотя можно обойтись только понижением, просто в начале чуть завысить, тем более в начале погона и отбор пошустрее. Ещё один момент, можно ли добавить второй клапан и автоматически переключаться с отбора голов на тело(либо по температуре куба, либо ещё по какому нибудь параметру, датчику уровня например), хвосты можно отбирать через клапан голов , а можно и вообще не отбирать.
С шимом надо подумать. Если датчик установлен в дэфе то увеличение скорости — это гарантированный пропуск хвостов в отбор.
Я сейчас я заканчиваю новую прошивку, в ней есть возможность расширения. Т.е. можно реализовать и доп. датчики и исполнительные устройства, все что угодно. По ходу дела буду добавлять эти функции в приложение Подробнее тут: https://homesamogon.ru/bp/
Если датчик в дефе, то пожалуй такой алгоритм вообще не прокатит, всё таки он для датчика в теле насадки (20-30 см от куба). Вообще реализация зачётная и с управлением на андроиде, надо будет на досуге собрать, посмотрел под кроватью все детали есть, кроме БТ модуля, но его можно задорого в соседней лавке купить если с алика будет невтерпёж.
В новой схеме добавлю поддержку wifi на ESP8266
кстати , на схеме нет преобразователя уровня для WiFi модуля, или я что то не доглядел? Он ведь работает на 3,3V а ардуинка на 5.
Вопрос снят, стабилитрон то я и не приметил.
Неа 🙂
Стабилитрон нужен для согласования уровня на RX ESP8266 (кстати, схема прекрасно работает и без него)
Питание 3.3В обеспечивает преобразователь LM1117
Я и имел ввиду уровни сигналов (RX/TX). Есть такие согласующие платки.
https://ru.aliexpress.com/item/IIC-I2C-Logic-Level-Converter-Bi-Directional-Module-5V-to-3-3V-For-Arduino/1972712019.html